01900 816000
Risehow Hydraulics Centre, Flimby, Maryport Cumbria, CA15 8PA
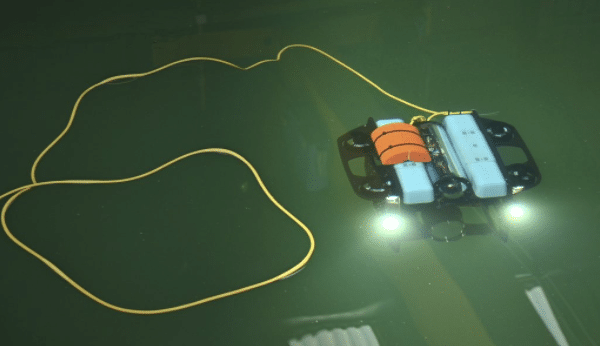
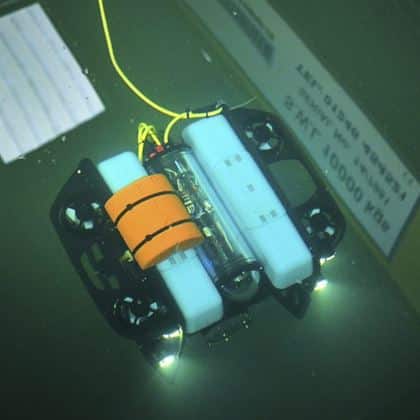
A STATE-OF-THE-ART underwater survey robot being developed by a collaboration of companies from across the UK is on schedule for completion next spring after a successful first demonstration.
Forth Engineering in Cumbria hosted Drop One Trials of the autonomous underwater system for nuclear inspection at its headquarters in Cumbria in August.
It is part of the Autonomous Aquatic Inspection and Intervention (A2I2) collaborative R&D project supported by Innovate UK under the Industrial Strategy Research Fund.
The A2I2 consortium, led by Rovco, is developing various world-leading technology for use across multiple sectors, including offshore wind, nuclear, oil and gas, and other industries, which aims to improve safety by reducing risks when working in challenging and hazardous environments.
Forth, Rovco, D-RisQ, the National Oceanography Centre (NOC), Thales UK and The University of Manchester, have been developing autonomous underwater systems as part of a cross-cutting programme, which brings together expertise from multiple industries and academia.

Forth Engineering (Cumbria) Ltd is an award-winning UK advanced technology solutions business with bases at Maryport, Cleator Moor and Barrow-in-Furness in Cumbria.
Forth’s Avexis robot is a previous winner of the Best Academic Collaboration Award at the Innovus Awards backed by the National Nuclear Laboratory and The University of Manchester’s Dalton Nuclear Institute to showcase pioneering technology being used in industry.
Rovco has been supporting each work stream with its groundbreaking, artificial perception technologies including 3D Computer Vision, Simultaneous Location and Mapping (SLAM), autonomous path planning and scene understanding using Machine Learning (ML). Rovco’s Intelligent Data Collection System can be integrated into any subsea vehicle to enhance its capability.
D-RisQ brings advanced automated software development tools to safety-critical, security-critical and business-critical systems developers. D-RisQ has used these tools to develop high integrity, autonomous decision making, safety-critical software for this demonstrator that enables the autonomous operation in accordance with regulatory requirements.
The University of Manchester is developing wireless underwater communications, which will ultimately eliminate the need for a tether, allowing the robots developed in A2I2 to operate more freely in hazardous environments.
Forth’s other recent projects include working to develop a world-first Friction Stir Welding Robotic Crawler (FSWbot) for internal repair and refurbishment of pipelines which can be used by a range of industries without having to stop production.
It has also worked with partners on developing the pioneering Hullguard system of protecting floating offshore installations from corrosion without using divers which has been successfully deployed for the first time in the UK North Sea.
To fast-track other collaborative solutions, Forth is developing its 68,000 square-feet base in Cleator Moor as an innovation hub where products such as FSWbot will be developed.
The company has also been on the frontline when it comes to fighting COVID-19. It has developed a disinfecting robot, and supplied disinfecting cannons, to help a range of industries, businesses and organisations welcome back staff and customers safely.
Forth gave up its Cleator Moor office space for free during lockdown to charity Scrub Hub North West which delivered essential equipment to local hospitals.







Head Office
Risehow Hydraulics Centre
Flimby
Maryport
Cumbria
CA15 8PA
T. 01900 816000
E. info@forth.uk.com
Mon – Friday: 8 am – 5 pm.
Saturday: 8 am - 1:30 pm.
Sunday: CLOSED.
Trade Call Out service: 24 hours
Here at Forth, we dedicate ourselves to engineering excellence.
We work closely with industry leaders in a wide range of sectors to help them deliver innovative and ground-breaking solutions to complex problems.